Introduction à la robotique
Définition : Robot
Un robot est un appareil automatique capable de manipuler des objets ou d’exécuter des opérations selon un programme qui peut être fixe, modifiable ou adaptable.
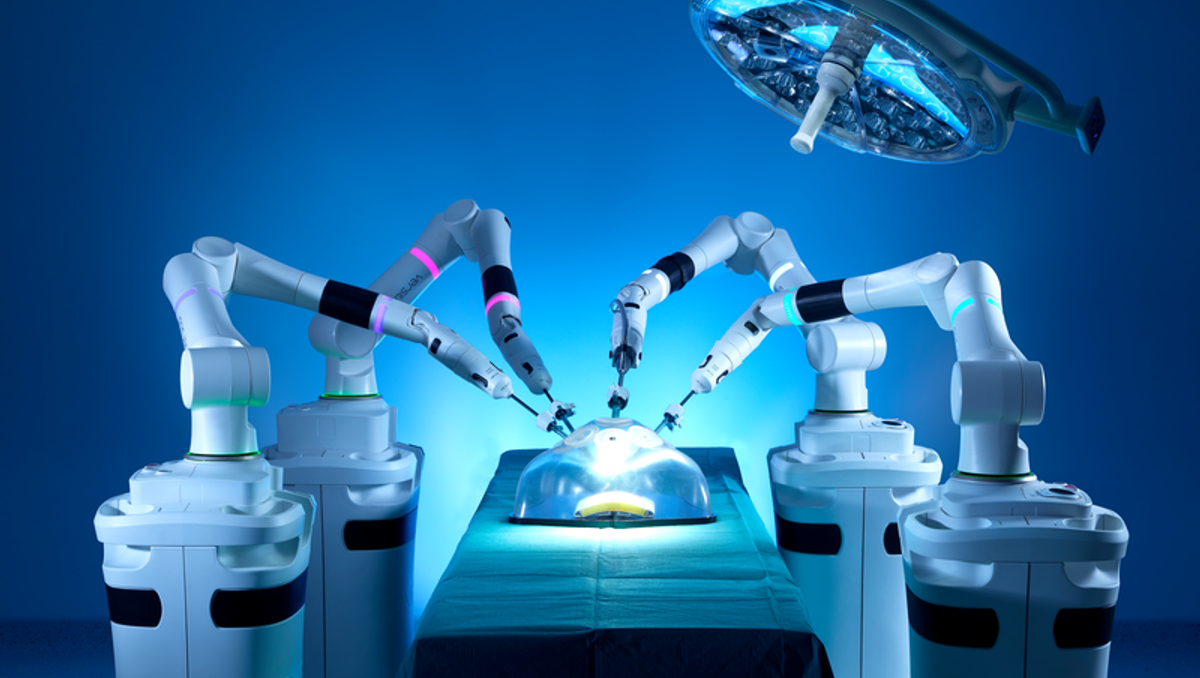
Les domaines d'application
Médecine
Militaire
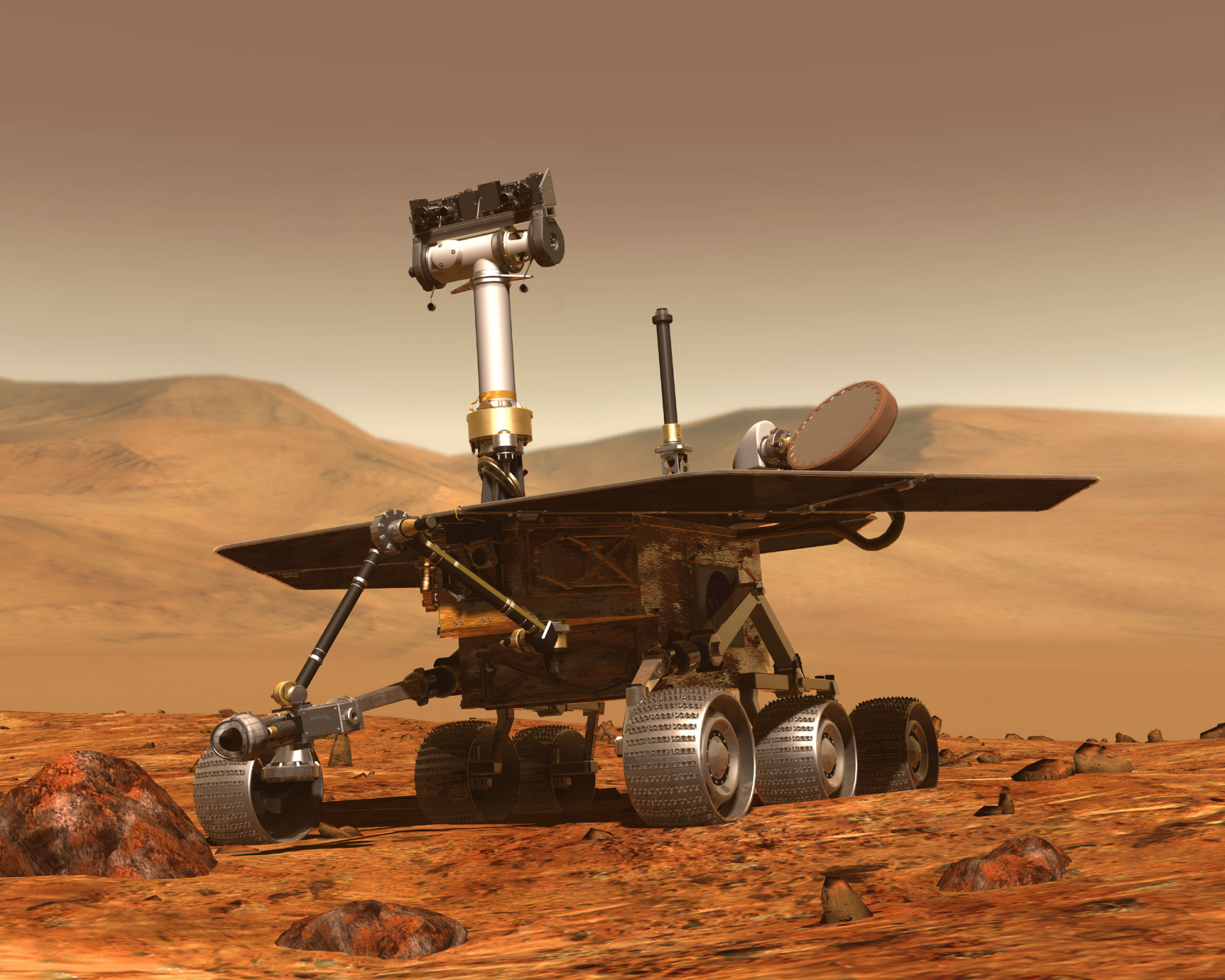
Exploration spatiale
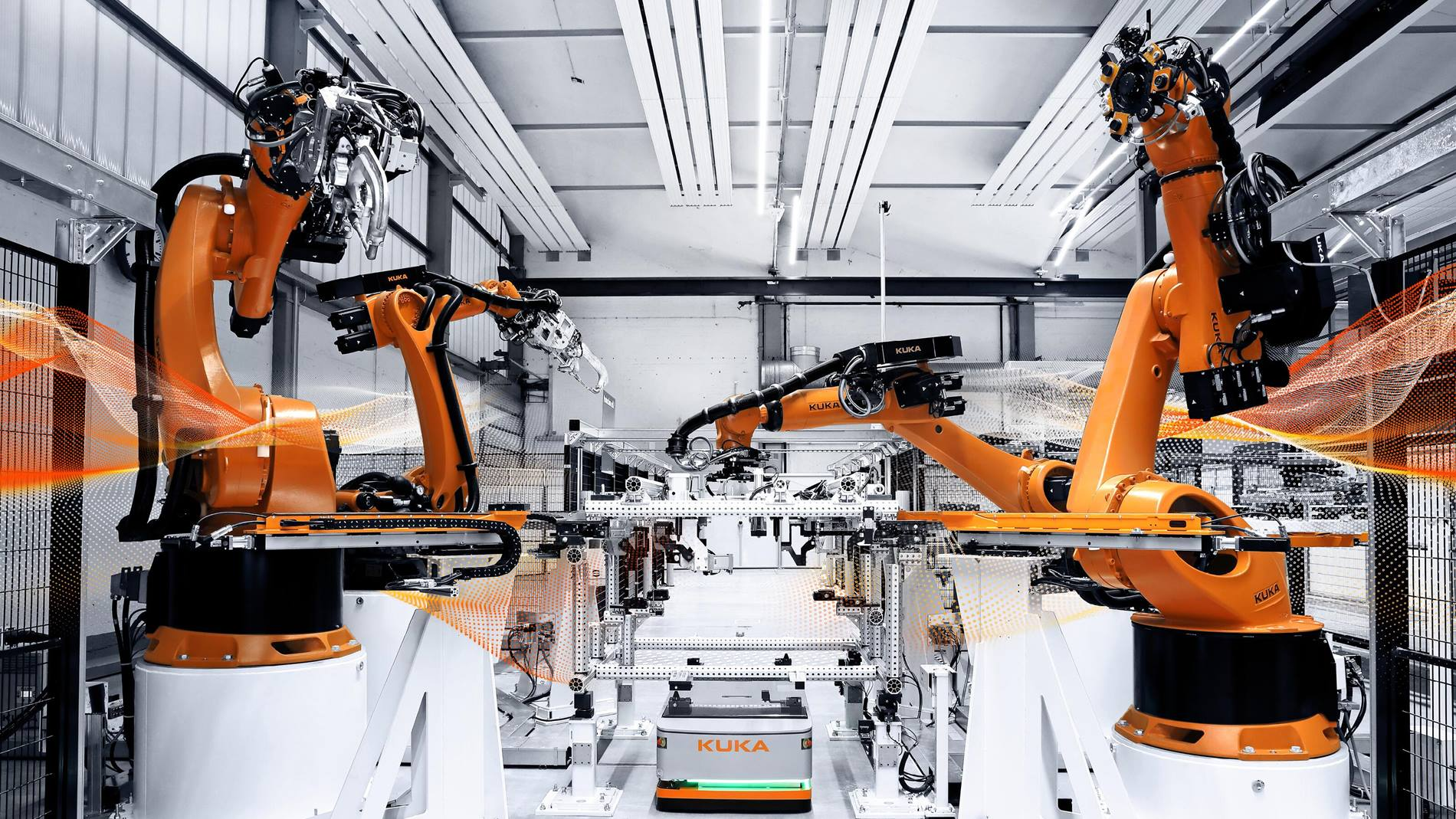
Industrie
Domestique
Loisirs
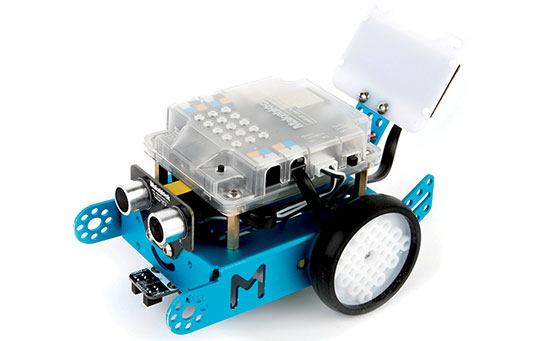
Education




Les différents types de robots
Il existe différents types de robots, et un robot peut combiner en combiner plusieurs :
robots mobiles ;
Drones ;
Robots sous-marins ;
Robots humanoïdes ;
Robots sociaux ;
Robots manipulateurs.
Constituants d'un robot manipulateur
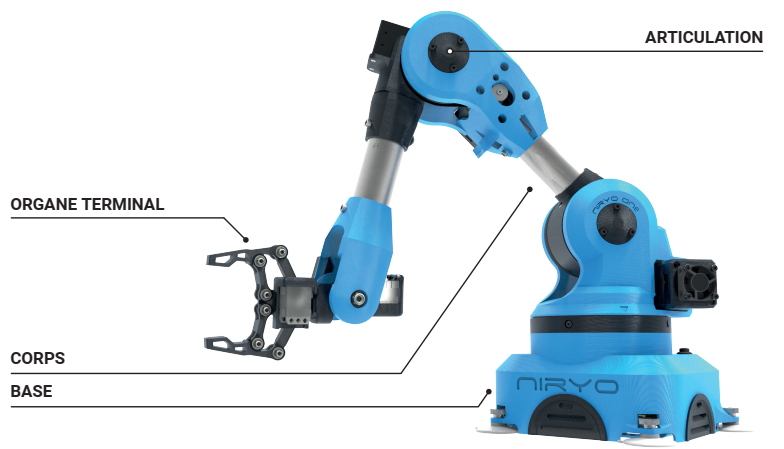
On distingue classiquement quatre parties principales dans un robot manipulateur :
Système Mécanique Articulé (S.M.A.)
Il représente le « squelette » du robot. Il s’agit d’un ensemble de corps rigides reliés par des articulations à leurs extrémités.
Organe terminal
On regroupe dans cette catégorie tout dispositif destiné à manipuler des objets (dispositifs de serrage, dispositifs magnétiques, à dépression…), ou à les transformer (outils, torche de soudage, pistolet de peinture…).
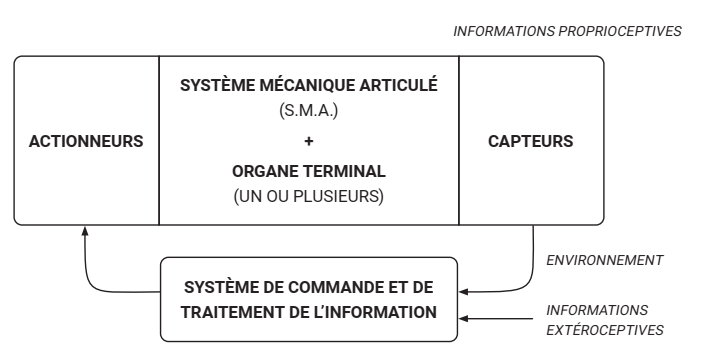
Système de commande et de traitement de l’information
Il synthétise les consignes pilotant les actionneurs à partir de la fonction de perception (les capteurs) ainsi que des ordres de l’utilisateur.
Capteurs
Ce sont des instruments qui mesurent des grandeurs physiques. Ils peuvent recueillir des informations sur l’environnement extérieur (détection de présence, de contact, mesure de distance) ou mesure l’état interne du robot (encodeurs, capteurs de température, etc.).
Les actionneurs
Ils permettent de mettre en mouvement des systèmes mécaniques à partir de commandes électriques (moteurs, vérins, servomoteurs...).
Fondamental : Degré de liberté
Le DOF (degré de liberté) désigne la capacité d’un système à se mouvoir selon un axe de translation ou de rotation.
Afin de déplacer un solide dans l’espace, un système a besoin de 6 degrés de liberté :
3 pour les translations,
3 pour les rotations.
Position d'un solide dans l'espace
La position d’un solide dans l’espace requiert 6 paramètres indépendants :
3 paramètres indépendants définissent la position d’un point, noté P, du solide (coordonnées cartésiennes, cylindriques, sphériques, (...), dans la base du repère fixe),
3 paramètres indépendants déterminent l’orientation du solide autour du point P (angles d’Euler, paramètres d’Euler...).
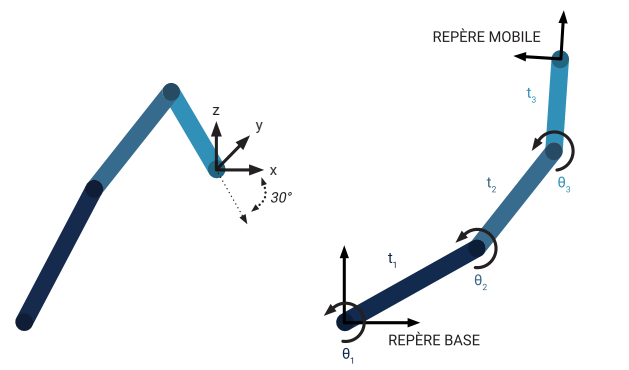
Nous verrons en TP que l’on dispose, via la console du robot, de la situation (position et orientation) du repère terminal (outil), à travers les coordonnées x, y et z du point d’origine du repère terminal et des angles d’Euler (\(\Psi\), \(\theta\), \(\Phi\)).
La présentation de la position du robot par les coordonnées cartésiennes est appelée le modèle géométrique inverse.
D’autre part , le modèle géométrique direct exprime les coordonnées articulaires du robot.