Présentation du robot Niryo One
Description générale
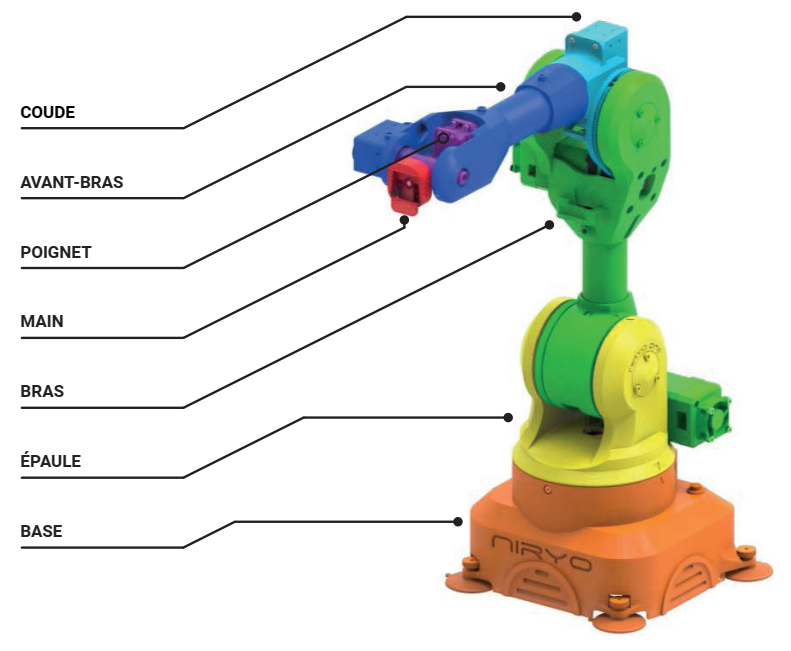
Le robot Niryo One est un robot didactique collaboratif de type poly-articulé à 6 degrés de liberté. Il est composé de 7 parties :
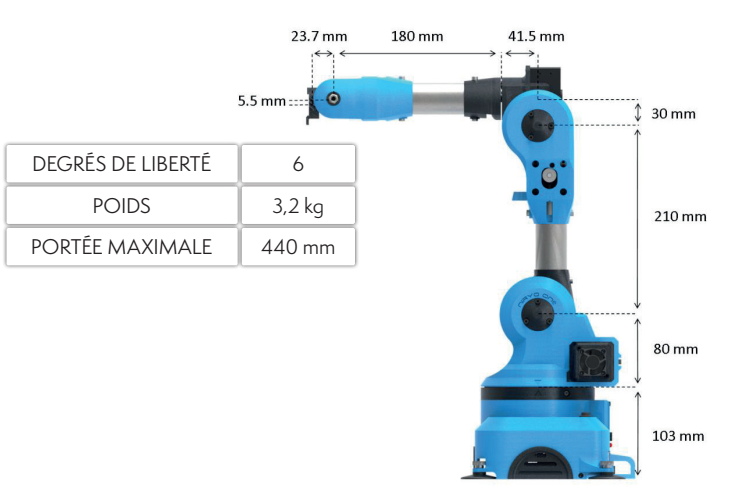
Dimensions
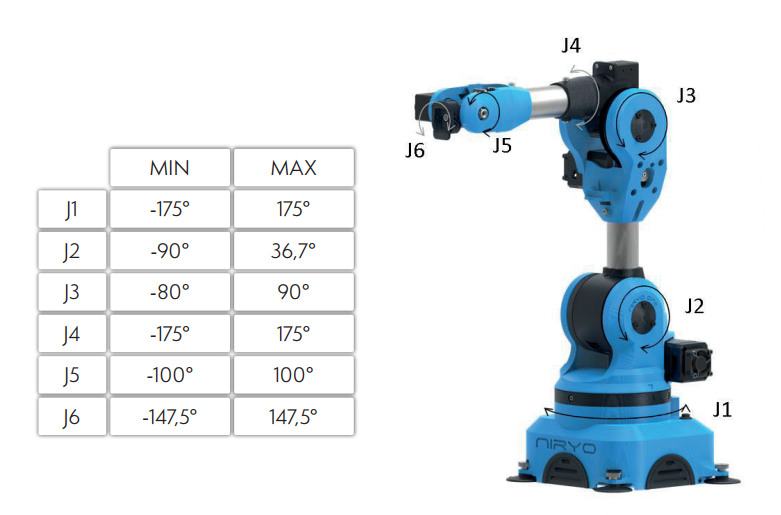
Rotation s maximales
Chaque axe a un mouvement appelé J :
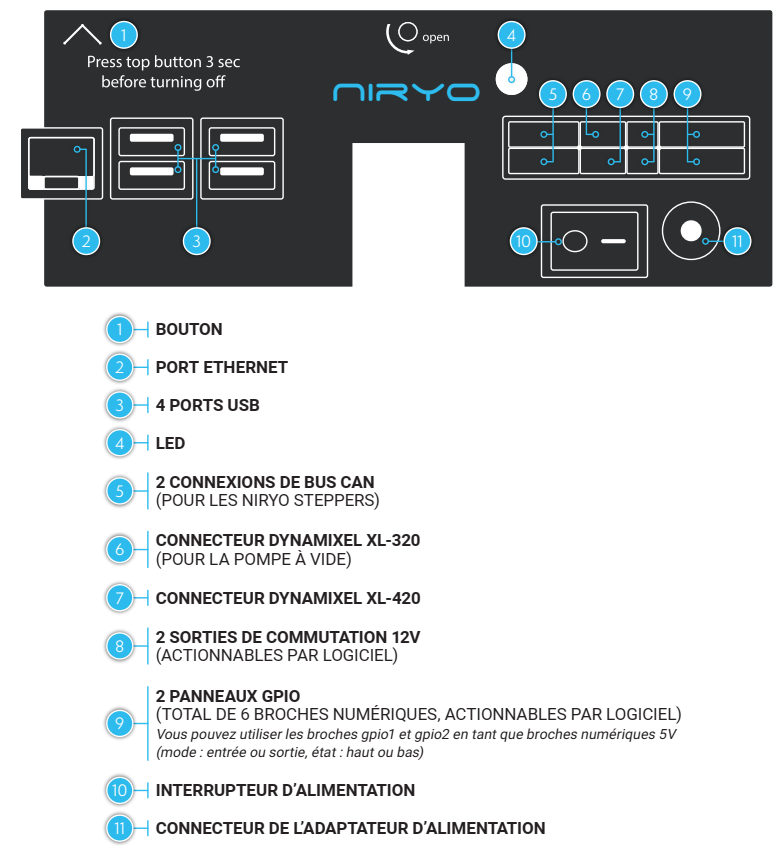
Interface Physique Externe
Accessoires
Différents accessoires ont été développés pour permettre au Niryo One d’interagir avec son environnement :

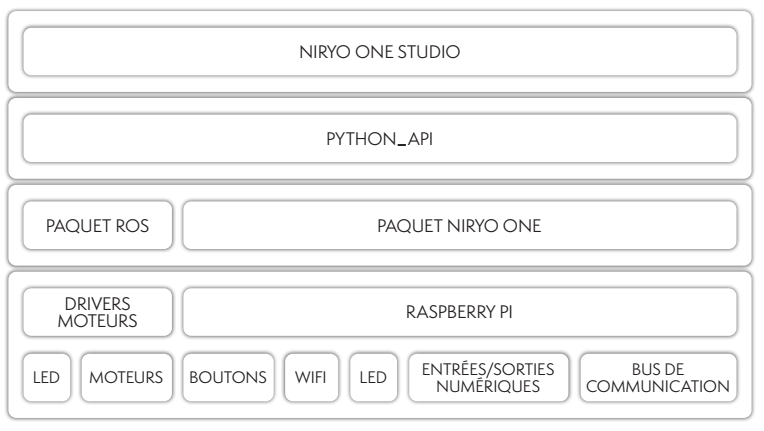
Architecture globale du Niryo One
Pour donner des instructions au robot Niryo One, ses utilisateurs implémentent des algorithmes à l’aide de logiciels de programmation (Niryo One Studio, Python-API, etc.) qui sont installés, par exemple, sur l’ordinateur.
A son tour, Niryo One a son propre ordinateur (le Raspberry Pi) qui gère les instructions données par les utilisateurs et contrôle le fonctionnement de tous les éléments nécessaires pour effectuer des tâches (tous les capteurs et les actionneurs).
D’autre part, le firmware du Niryo One s’occupe des parties logicielles qui sont responsables des comportements préprogrammés, du fonctionnement de tous les éléments électroniques de base, et de la gestion des programmes créés par l’utilisateur. Le schéma ci-après illustre la structure interne du robot et toutes les connexions de ses éléments :