Prise en main de Niryo One Studio
Présentation de Niryo One Studio
Niryo One Studio est l’application de bureau permettant de contrôler le robot Niryo One.
Elle est utilisée pour configurer le robot, modifier certains paramètres, le déplacer, programmer une séquence, etc.
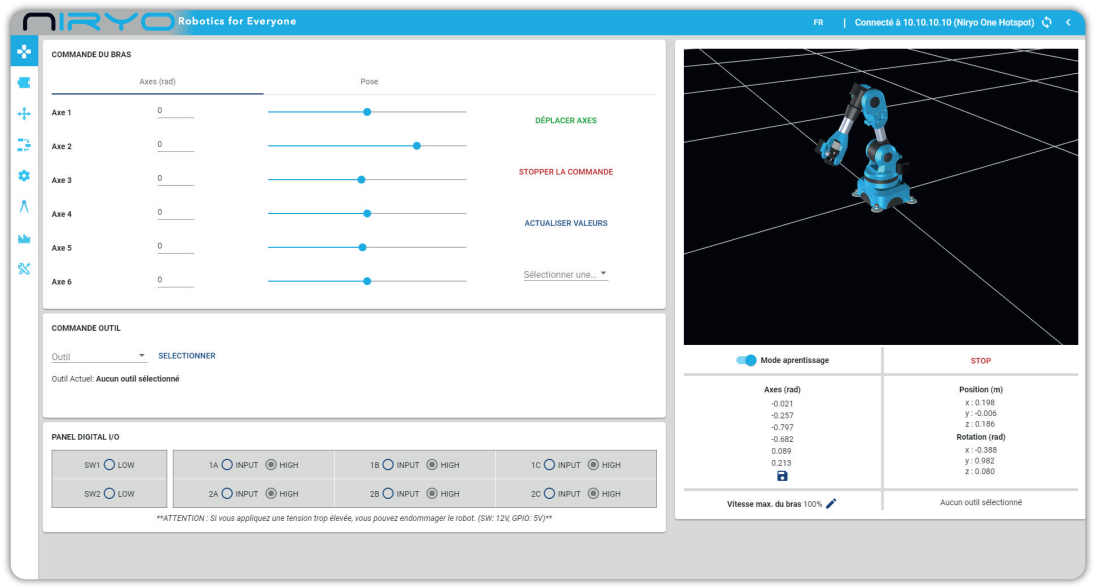
Nous allons découvrir les fonctionnalités disponibles dans le logiciel Niryo One Studio afin de pouvoir programmer votre robot Niryo One.
Sur la gauche de l’interface, vous pouvez retrouver le menu de Niryo One Studio, à la verticale.
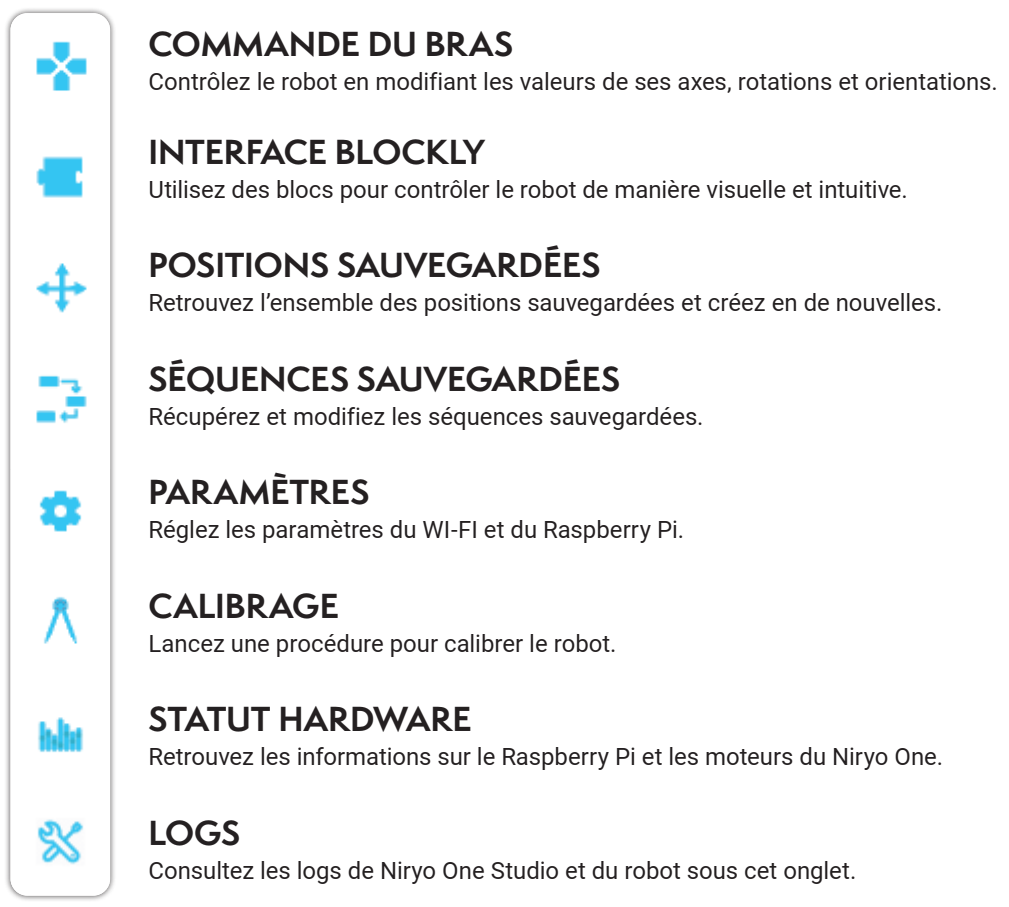
Quelque soit l’onglet sélectionné dans le menu, vous bénéficiez toujours :
D’un retour d’informations en temps réel sur la position de chaque axe du robot,
D’une simulation 3D de ses mouvements.
Méthode : Connecter le robot à Niryo One Studio
Lancez l’application Niryo One Studio,
Allumez votre robot,
Quand le voyant du robot devient bleu, vous pouvez effectuer la connexion.
À droite de la barre d’outils, vous pouvez voir l’état actuel de la connexion : « Non connecté » ou « Connecté à » + adresse IP du robot.

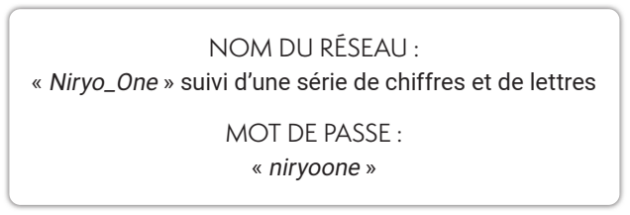
Tout d’abord, connectez votre ordinateur au réseau WIFI de votre robot :
Une fois connecté au WIFI, dans Niryo One Studio, cliquez sur la flèche tout à droite de la barre d’outil, ce qui a pour effet d’ouvrir le panneau de connexion qui se présente comme suit :
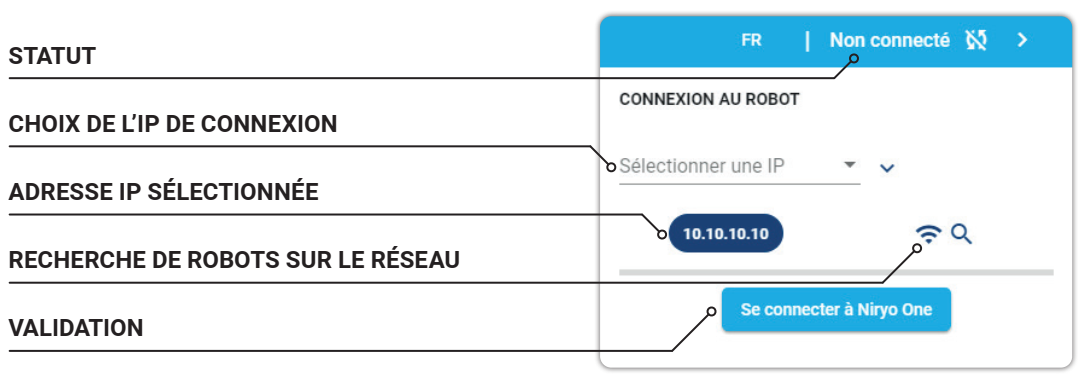
Dans la liste de sélection, choisissez « Niryo One hotspot »,
Cliquez sur « Se connecter à Niryo One ».

Pour vous déconnecter du robot, ouvrez à nouveau le panneau de connexion et cliquez sur « Se déconnecter de Niryo One »
Méthode : Calibrer le robot
Après avoir connecté votre robot, il est nécessaire de le calibrer.
La calibration est un processus utilisé pour améliorer la précision puisqu’elle permet l’identification de certains paramètres tels que la position relative des liaisons du robot.
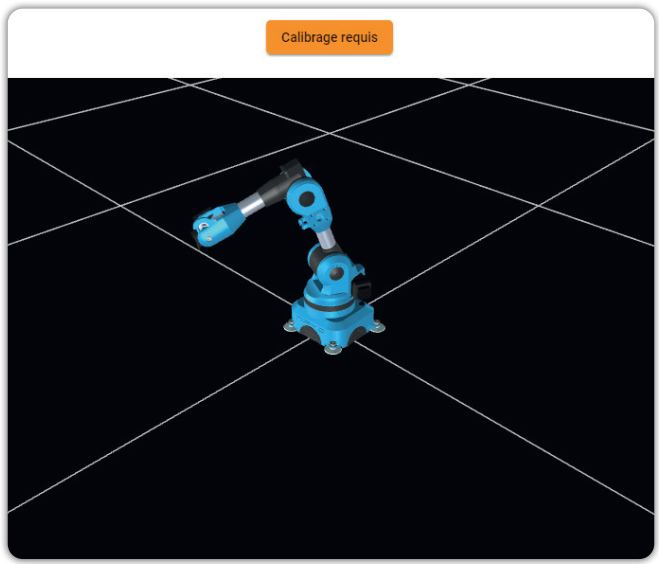
Pour la première utilisation, il est recommandé d’effectuer un calibrage automatique. Le robot va executer une série de mouvements jusqu’à atteindre ses butées mécaniques, lui permettant de retrouver sa position initiale, comme sur l’image ci-contre.
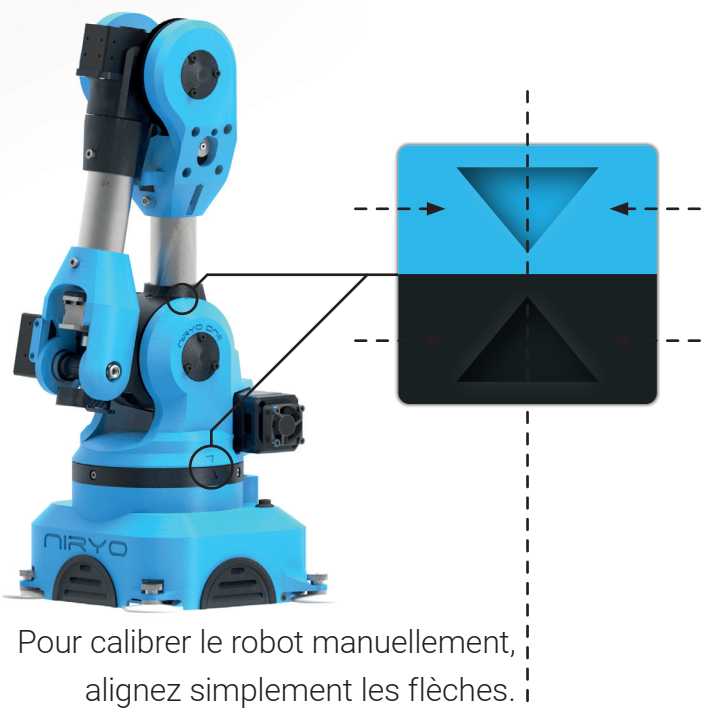
Pour les autres utilisations, vous avez également la possibilité de faire uncalibrage manueldu robot, que nous recommandons, pour lequel il vous suffit de placer le robot dans la position initiale en alignant les flèches comme sur le schéma ci-contre. Vous ne perdez aucune précision en faisant cela : la précision sera la même que celle du dernier calibrage automatique.
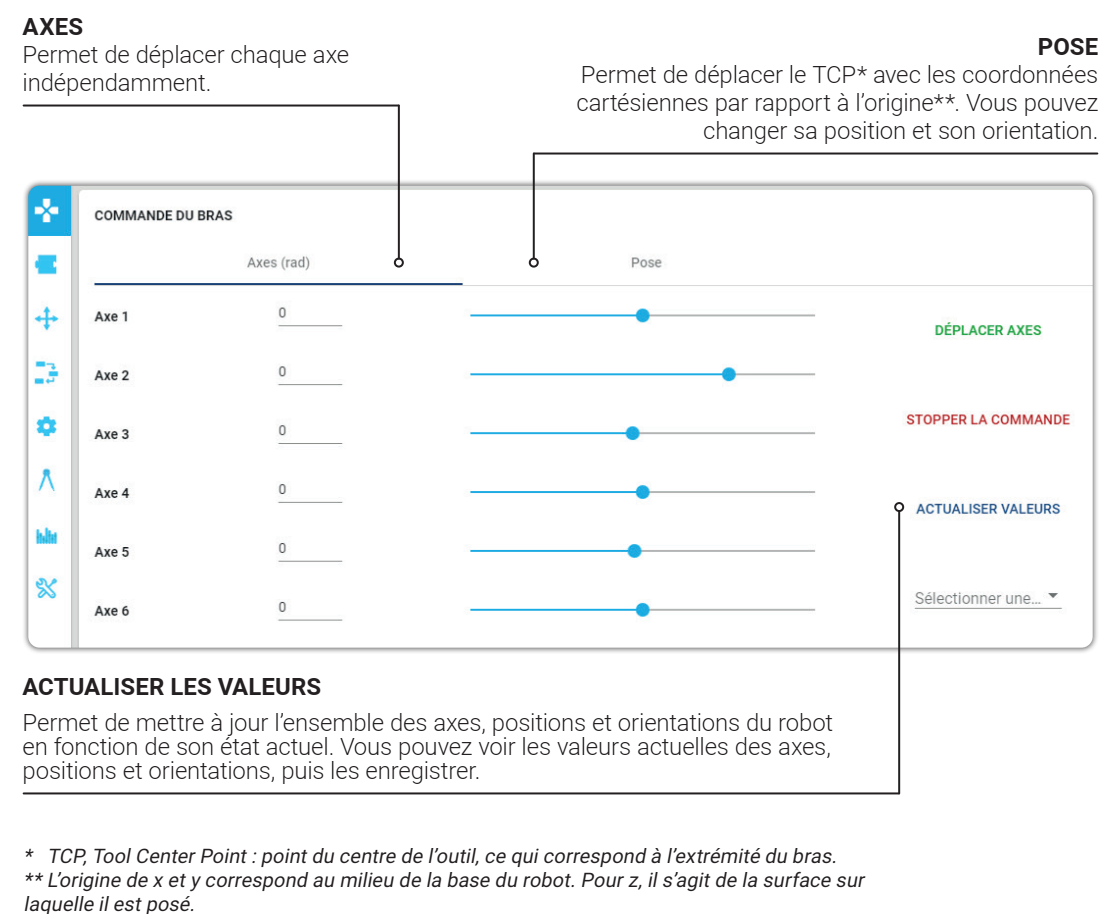
Méthode : Contrôler le robot